
















生产厂商:SPEC产品类别:系统工具
EEMBC® ADASMark benchmark测试套件是一款性能测量和优化工具,适用于构建下一代高级驾驶辅助系统 (ADAS) 的汽车公司。ADASMark 旨在分析自动驾驶中使用的 SoC 的性能,它利用代表高度并行应用的真实工作负载,例如环视拼接、分割和卷积神经网络 (CNN) 交通标志分类。ADASMark benchmark测试强调各种形式的计算资源,例如 CPU、GPU 和硬件加速器,从而允许用户确定可用计算资源的最佳利用率。
工作原理
2 级以上的 ADAS 实施需要计算密集型对象检测和视觉分类功能。满足这些要求的常见解决方案是在车辆周围放置一组可见光谱广角相机,以及一个图像处理系统,该系统为这些图像做好准备,以便经过训练的 CNN 进行分类。分类器的输出馈送给其他决策逻辑,例如转向和制动系统。这种安排需要大量的计算能力,并且评估可用资源的限制及其利用效率并不是一项简单的任务。ADASMark benchmark测试通过将应用程序用例与综合测试集合结合到一系列微benchmark测试中来应对这一挑战,这些微benchmark测试用于测量和报告处理计算机视觉、自动驾驶和移动成像任务的 SoC 的性能和延迟。
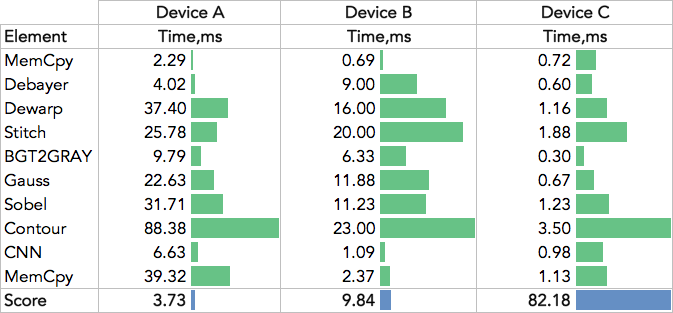
来自不同类别平台的实验结果。通过 DAG 的最长路径将确定分数。每个元素的执行时间和内存开销都会影响总分。
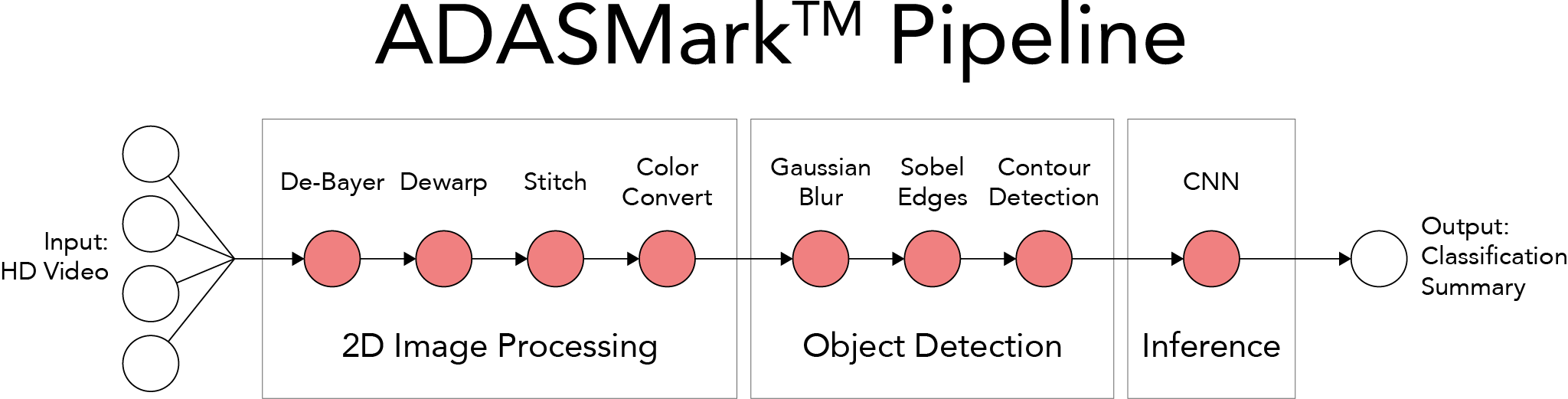
具体来说,benchmark测试的前端包含用于 de-warping、色彩空间转换 (Bayer)、拼接、高斯模糊和 Sobel 阈值过滤的图像处理函数,用于识别分类器的感兴趣区域 (ROI)。benchmark测试的后端图像分类部分执行经过训练以识别交通标志的 CNN。由四个高清环绕摄像头组成的输入视频流作为benchmark测试的一部分提供。视频的每一帧(每个摄像机一个帧)都通过定向亚克力图 (DAG)。在四个节点(模糊、阈值、ROI 和分类)处,框架验证管道工作的准确性。如果准确度在允许的阈值内,则测试通过。平台的性能仅记录为与视觉相关的 DAG 部分的执行时间和开销,这意味着benchmark测试时间不包括视频文件的主线程处理,或与将数据流拆分到 DAG 的不同边缘相关的开销。整体性能与 DAG 中最长路径(表示每秒帧数)相反。
ADASMark benchmark测试框架利用 OpenCL 1.2 嵌入式配置文件 API 来确保计算实现之间的一致性,因为大多数提供异构架构的供应商都支持这种流行的 API。开发人员可以自由构建最佳图形,并提供自己的 OpenCL 内核。这提供了强大的性能分析功能。
功能特征
· 利用 OpenCL 1.2 嵌入式配置文件 API
· 由一系列微benchmark测试创建的应用程序流
· Au-zone 制作的交通标志识别 CNN 推理引擎
· 运行默认benchmark测试和针对特定架构优化的版本
· 可重复、可验证和可认证 - 与其他 EEMBC benchmark测试一样
